- Home
- About us
-
Products
-
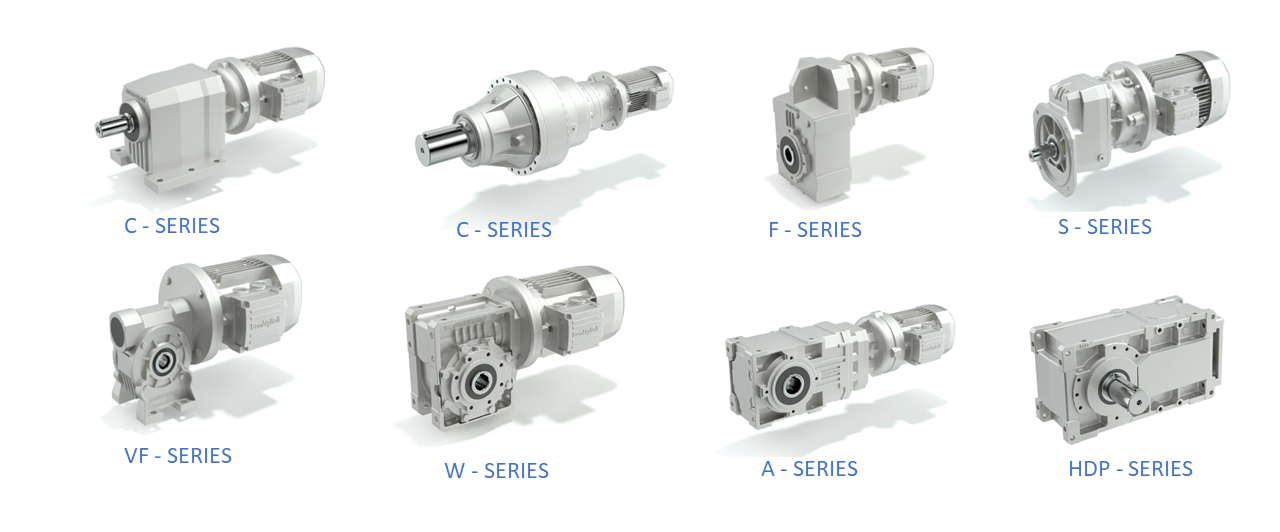
• BONFIGLIOLI GEAR MOTOR
-
• BONFIGLIOLI ELECTRICAL MOTOR
-
• INDUSTRIAL HEAVY-DUTY GEARED PRODUCTS
-
• INVERTERS & SERVO DRIVES
-
• MOTION CONTROL AND HUMAN MACHINE INTERFACE
-
• PRECISION PLANETARY GEARBOXES & GEARMOTORS
-
• MOTIVE LOW VOLTAGE MOTOR
-
• MOTIVE VARIABLE FREQUENCY DRIVES
-
• QUẠT TIẾT KIỆM NĂNG LƯỢNG EBMPAPST
-
• QUẠT TIẾT KIỆM NĂNG LƯỢNG HAILE
-
• BONFIGLIOLI GEAR MOTOR
- Application
- Projects
- Documents
- Videos
- News
- Contact


.jpg "Water treatment project")


.png "F Series - Bonfiglioli Helical Parallel-Shaft Gearmotors")
.png "VF/W Series - Bonfiglioli worm gear motor")


.png "300M Series - Bonfiglioli planetary gearbox")


























.png "Let")
.jpg "Các loại màu sơn dùng cho động cơ giảm tốc")




.png "Bonfiglioli")


 19/5 Đường số 4, P.Bình Hưng Hòa, Q.Bình Tân, TP.HCM
19/5 Đường số 4, P.Bình Hưng Hòa, Q.Bình Tân, TP.HCM 0282.2537 656 - 0906.60 84 60
0282.2537 656 - 0906.60 84 60 info@longminhtech.com
info@longminhtech.com www.longminhtech.com
www.longminhtech.com